Lab 12
Path Planning and Execution
In this lab, I moved around a map using PID control.
In this lab, I moved around a map using PID control.
For this lab I first had to decide how I wanted to tackle this project whether to do open loop, closed loop, or to hard code things in or not. After looking through last year's implementations, I decided that it would be good for me to do open loop for the first two waypoints since we know exactly where we are in the beginning. This would save some precious time so the car wouldn't have to do localization the first time. I then decided to do local path planning rather than global path planning mainly for the sake of time since we already had exposure to this from previous labs. The plan was after doing open loop to get from the first to the second point, I would then start doing localization so the car could figure out where it was. After this I would calculate the needed target angle for the car to move based on the ground truth and belief state. Then I would do PID control for turning and moving straight so the car could move to the next waypoint. I would have the car do this in a loop until all the waypoints were reached until it reached the origin. Unfortunately due to timing constraints I was not able to do mapping and was only able to do PID control for the car to move around the map.
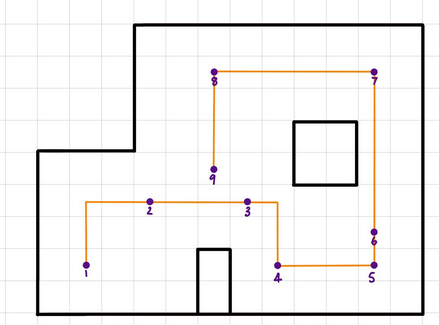
I had to plan out the route that the car was going to take, so I took inspiration from Bhadra's mapping and implementation to do this. I decided to also do 90 degree turns for the car to move around the map. Below is a map of the route I planned the car to taking. I used the map in upson hall to do all my runs.
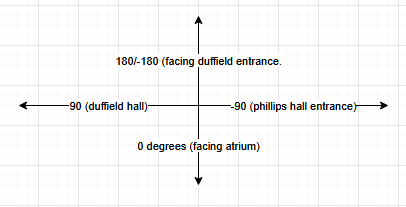
I had the car start with the TOF sensor facing forward. When I initialized the car, I set 0 the opposite way with the TOF sensor facign the other way. This was just an arbitrary thing I decided that I just went with for the rest of the lab to control the angles of the car. Below is an image of how the angles are done.
For this lab I just reused the PID control function I coded from previous labs to do this assignment. I used the same PID constants I used from previous labs. Kp = 0.4. Ki = 0.0004. Kd = 0.15. Kp_ori = 1.3. Ki_ori = 0.15. Kd_ori = 0.5. I created two new commands to control the car using PID control to move the car forward and backward based on the given target distance and used PID orientation control to turn the car based on a desired angle. These two new commands were called MOVE_STRAIGHT and TURN_ANG that each took in a target distance/angle. On the python side, I would just call both these commands to move the car how I wanted using my calculated target distance values and angles. I just used the tiles and the fact that each tile was around 304mm to get the values for the target distance. While implementing these commands, I faced a lot of control flow issues to make sure the car actually moved and left the loop. Thus I gave my car a limit of 5 seconds to reach the target distance/angle for each waypoint. Below is my implementation.
I just used the same implementation from lab 5 and 6 to do this part. I found that the angles were pretty accurate so I just kept the 0 and 90 angles as my actual angle as my target angle.
Below are my commands I used to control the car around the waypoints. I wasn't exactly accurate with the actual numbers for the distances because the PID controller wasn't accurate to the mm anyways. I could have tuned the PID controls to be more accurate but I thought that my current performance was good enough to reach the waypoints and move around.
This run was my best one. I noticed towards the end, angle 0 was not actual 0. I think I could have changed the angle a little bit to like 10 or 20 to get the car to actually run back to (0,0) in a straight line. All in all, the car moved in pretty straight lines. If I had more time, I would have optimized my angles more so instead of it being straight 90,0, I would have used 5 or 85 as my angles. The car still hit the waypoints within a tile during this run though which I thought was suitable.
This was a slightly worse run in my opinion but there were some parts to it that were better than Run 1. I felt this one hit waypoint 3 and 4 better than the other one but was worse at the last waypoint. Still I decided to add this one to show that this run could be completed multiple times. If I had more time, I think I could have reliably done localization for this lab but just stuck to PID because I was working alone for this lab.
I worked alone for this lab but I referenced Bhadra Bejoy for implementation.